1. Kondisi [Kembali]
Modul 2 percobaan 1 no. 4 :
Buat vehicle belok kanan
2. Gambar Rangkaian Simulasi [Kembali]

5. Video Simulasi [Kembali]
6. Prinsip Kerja Rangkaian [Kembali]

2. Gambar Rangkaian Simulasi [Kembali]

Gambar 1.rangkaian simulasi

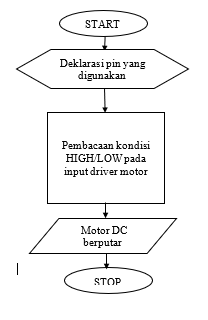
Gambar 2.flow chart kondisi
#define in1 9 //Deklarasi pin 9 sebagai input 1
#define in2 10 //Deklarasi pin 10 sebagai input 2
#define in3 6 //Deklarasi pin 6 sebagai input 3
#define in4 5 //Deklarasi pin 5 sebagai input 4
void setup() { //Semua kode dalam fungsi ini di eksekusi sekali
pinMode(in1, OUTPUT); //Deklarasi in1 sebagai OUTPUT
pinMode(in2, OUTPUT); //Deklarasi in2 sebagai OUTPUT
pinMode(in3, OUTPUT); //Deklarasi in3 sebagai OUTPUT
pinMode(in4, OUTPUT); //Deklarasi in4 sebagai OUTPUT
}
void loop() { //Semua kode dalam fungsi ini dieksekusi berulang
digitalWrite(in1, LOW); //in1 diberi logika 0
digitalWrite(in2, HIGH); //in2 diberi logika 1
digitalWrite(in3, LOW); //in3 diberi logika 0
digitalWrite(in4, LOW); //in4 diberi logika 0
delay(1000); //Jarak waktu 1000 ms setelah input dieksekusi
digitalWrite(in1, LOW); //in1 diberi logika 0
digitalWrite(in2, HIGH); //in2 diberi logika 1
digitalWrite(in3, HIGH); //in3 diberi logika 0
digitalWrite(in4, LOW); //in4 diberi logika 0
delay(10000); //Jarak waktu 10000 ms setelah input dieksekusi
}
5. Video Simulasi [Kembali]
Pada rangkaian ini di Arduino saya menggunakan pin yang memiliki tanda tilde karena pada pin tersebut terhubung ke rangkian PWM yang mengubah sinyal digital ke bentuk-bentuk pulsa. Pin-pin tadi di hubungkan ke L293D atau driver motor yang diberi motor DC pada outputnya. Berikut rangkian yang saya buat dengan 2 sumber tegangan agar motor dapat tegangan yang cukup untuk berfungsi atau berputar. Motor berputar tergantung output yang diberikan oleh driver motor yang inputnya berasal dari arduino. Putran motor bergantung sekali dengan listing program yang dimasukan ke arduino. Berikut rangkiannya.

Berikut penjelasan listing program pada arduino :
#define in1 9 //Deklarasi pin 9 sebagai input 1
#define in2 10 //Deklarasi pin 10 sebagai input 2
#define in3 6 //Deklarasi pin 6 sebagai input 3
#define in4 5 //Deklarasi pin 5 sebagai input 4
- Pada listing program ini digunakan untuk deklarasi pin yang digunkan pada arduino sebagai input yang dimasukan ke dalam variabel masing-masing in1, in2, in3, dan in4.
void setup() { //Semua kode dalam fungsi ini di eksekusi sekali
pinMode(in1, OUTPUT); //Deklarasi in1 sebagai OUTPUT
pinMode(in2, OUTPUT); //Deklarasi in2 sebagai OUTPUT
pinMode(in3, OUTPUT); //Deklarasi in3 sebagai OUTPUT
pinMode(in4, OUTPUT); //Deklarasi in4 sebagai OUTPUT
}
- Void setup adalah fungsi dilakukan sekali dan kode didalamnya yaitu masing-masing digunakan untuk mendeklarasikan variabel in1, in2, in3, dan in4 sebagai output pada arduino.
void loop() { //Semua kode dalam fungsi ini dieksekusi berulang
digitalWrite(in1, LOW); //in1 diberi logika 0
digitalWrite(in2, HIGH); //in2 diberi logika 1
digitalWrite(in3, LOW); //in3 diberi logika 0
digitalWrite(in4, LOW); //in4 diberi logika 0
delay(1000); //Jarak waktu 1000 ms setelah input dieksekusi
- Pada listing program diatas adalah salah satu kode yang berada di fungsi void loop yang semua kodenya dilakukan berulang-ulang. kode diatas digunakan untuk membelokan vehicle dengan 2 motor pada rangkian diatas yang satu dihubungkan di roda kiri dan satu lagi dihubungkan di roda kanan. jadi untuk membelokkan vehicle ke kanan maka roda kiri maju dan roda kanan diam. maka pada IN1 pada driver kita beri logika HIGH dan IN2 pada driver diberi logika LOW sehingga motor berputar ke kanan sehingga roda kiri maju dan pada IN3 dan IN4 sama-sama diberi logika sama LOW atau HIGH sehingga tidak ada beda potensial sehingga tidak ada arus mengalir di motor DC sehingga motor kanan akan diam. vehicle berbelok ke kanan selama 1000ms setelah itu dilanjutkan ke listing program selanjutnya.
digitalWrite(in1, LOW); //in1 diberi logika 0
digitalWrite(in2, HIGH); //in2 diberi logika 1
digitalWrite(in3, HIGH); //in3 diberi logika 0
digitalWrite(in4, LOW); //in4 diberi logika 0
delay(10000); //Jarak waktu 10000 ms setelah input dieksekusi
}
- Pada listing program selanjutnya saya memberi kode agar vehicle bergerak maju dengan memebuat motor kiri dan kanan berputar kekanan dan membuat kedua roda maju. Jadi inpu yang saya masukan adalah IN1 dan IN 3 pada driver saya beri logika HIGH dan IN2 dan IN4 saya beri logika low sehingga kedua motor berputar kekanan dan roda akan maju. kode ini berlansung selama delay yang saya masukan yaitu 10000ms dan apabila telah selesai maka fungsi loop akan diulang kembali.
Tidak ada komentar:
Posting Komentar